#
Custom Images
How to submit images from custom sources via the REST API.
#
Required Parameters
See the Capture Image REST API documentation. In addition to the actual image data, you need the following metadata.
runAn integer for the current device tracking session. Images with the same parameter are in the same relative coordinate space and the camera pose for the images can be used to compute orientation and map scale.
This should be the same for all images within the same continuous coordinate space. With ARKit, this should be incremented whenever tracking is lost or when the images are from different mapping sessions.indexis a running integer counter for the images.anchoris a boolean flag indicating the anchor image. There can only be one anchor image in the map. If multiple images with this parameter set True are submitted, the new ones always override the old one.px,py,pzare the float values for the position for the camera pose.r00,r01,r02,r10,r11,r12,r20,r21,r22are the float values for the matrix3x3 rotation matrix for the camera pose.fx,fyare the float pixel focal length values for the image for both image axes. They should be the same.ox,oy, are the float values for the principal point offset for both image axes. These values will be roughlyox = image_width / 2, oy = image_height / 2and some hardware-specific offset.
#
Coordinate System
Immersal uses a right-hand coordinate system for map construction and visual positioning.
#
Position
The input image position is expressed in a right-handed coordinate system where the forward direction is along the negative Z-axis.
#
Rotation
The rotation for the images is expressed as a 3x3 column-major rotation matrix in a right-handed coordinate system. The image coordinate system is similar to OpenCV where the image up direction is the negative Y axis and forward direction is the negative Z axis.
#
Using photogrammetry software as input
If you have existing photogrammetry models done in software such as Agisoft's Metashape, you can use the computed camera poses and the images as input to Immersal's Cloud Service.
Most software allows you to export the camera data required by Immersal.
You need to have the photogrammetry model in the correct metric scale, 1 unit = 1 meter. It's also good to have the model aligned so that the Y axis points up.
#
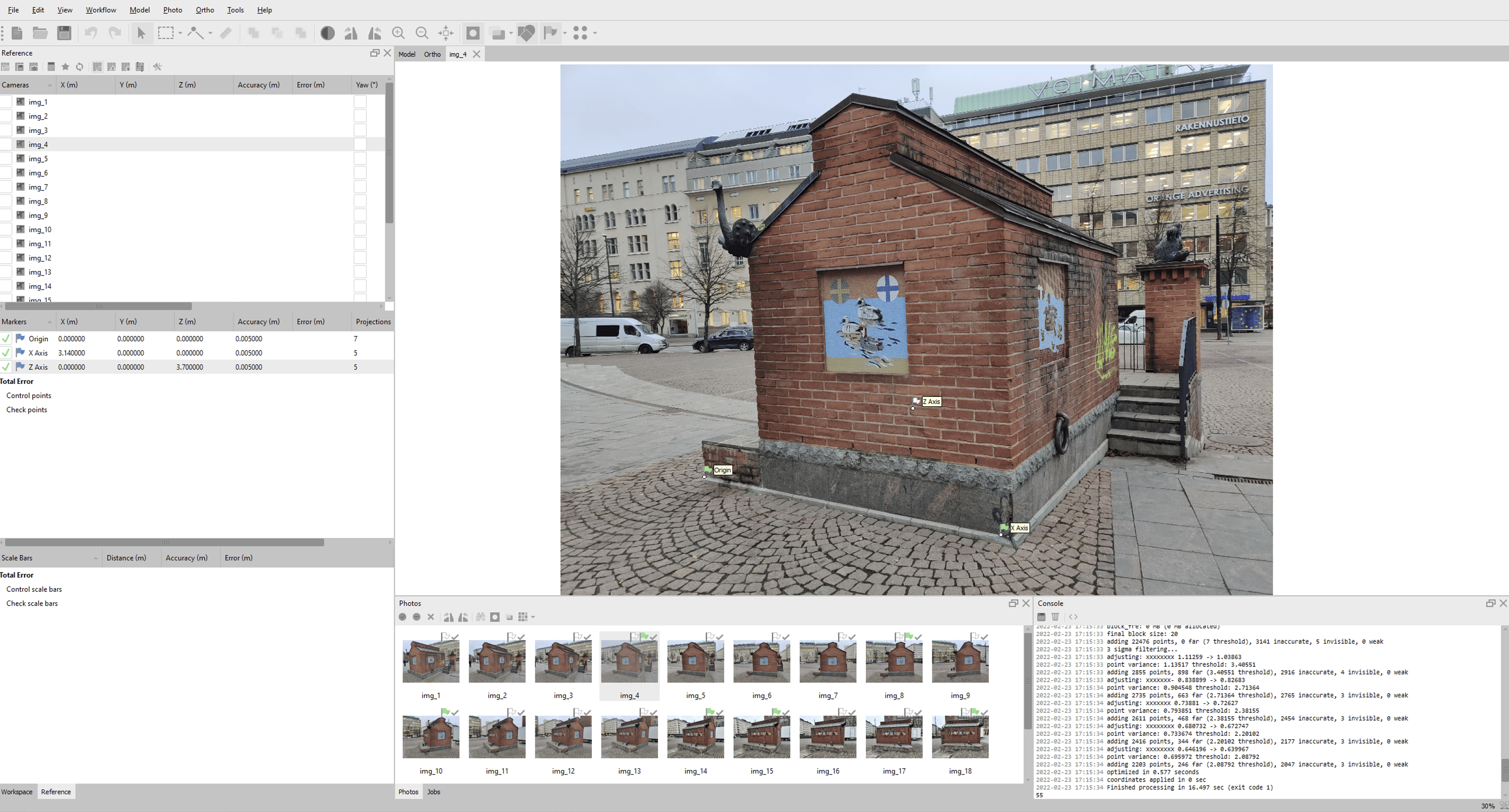
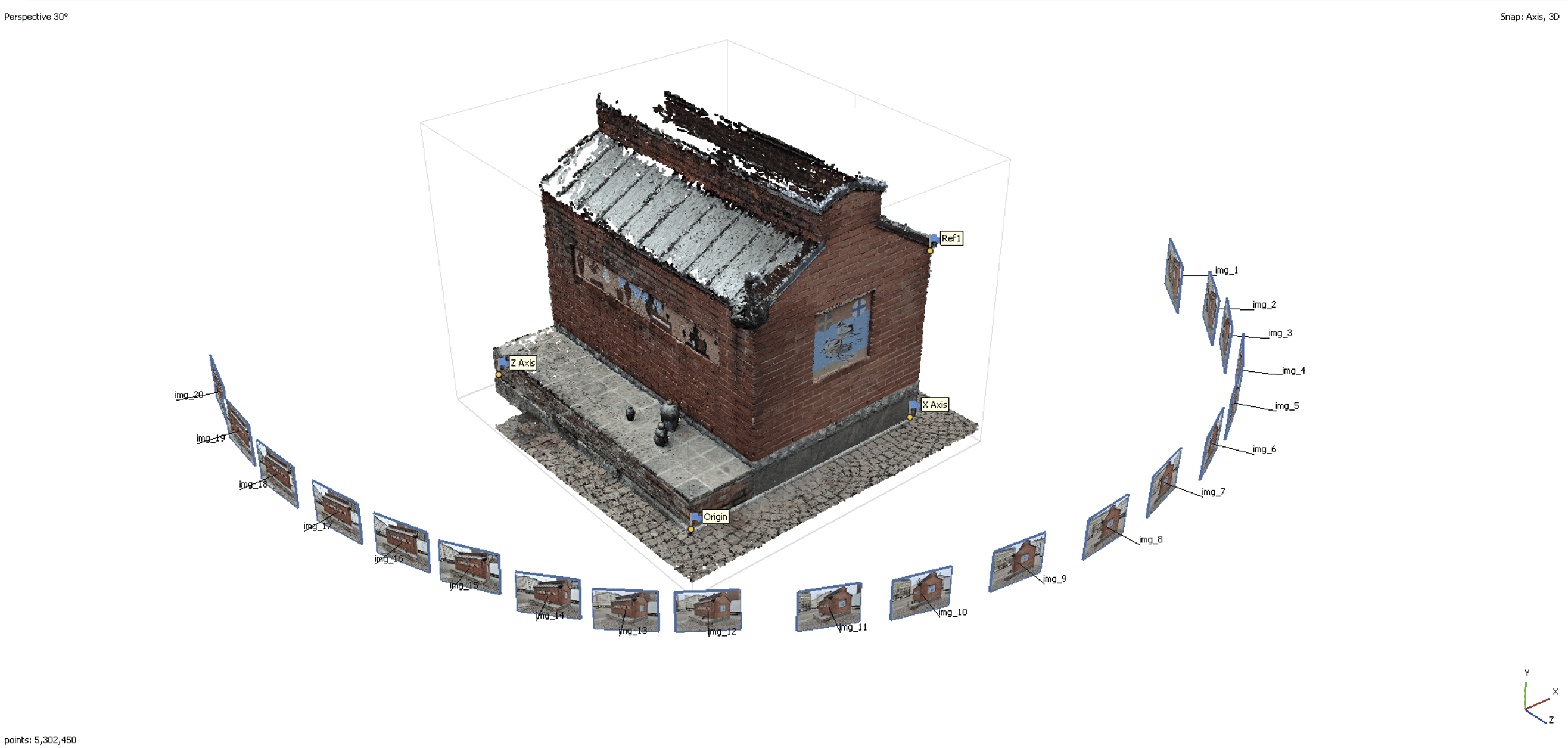
Metashape
- Construct a photogrammetry model in Metashape
- Use the Metashape tools to set the correct scale and orientation to the model
- Export the camera data as
.xmlFile -> Export -> Export Cameras... - Parse the
px,py,pz,r00...r22,fx,fy,ox,oyvalues from the.xmlfor each image and submit the image with the metadata to Immersal Cloud Service
Sample script to parse the required metadata from the .xml file and save it as .json files next to the images
from bs4 import BeautifulSoup # pip install bs4 lxml
import os
import numpy as np # pip install numpy
import json
def main(xmlFile, imagesDirectory):
with open(xmlFile, "r") as handle:
soup = BeautifulSoup(handle, "xml")
# SENSORS
sensorsList = []
sensors = soup.find_all("sensor")
for s in sensors:
sensor_id = int(s.attrs.get("id"))
calibration = s.find("calibration")
resolution = calibration.find("resolution")
width = int(resolution.attrs.get("width"))
height = int(resolution.attrs.get("height"))
f = float(calibration.find("f").contents[0])
cx = float(calibration.find("cx").contents[0])
cy = float(calibration.find("cy").contents[0])
data = {
"sensor_id": sensor_id,
"width": width,
"height": height,
"f": f,
"ox": width / 2 + cx,
"oy": height / 2 + cy,
}
sensorsList.append(data)
# COMPONENTS
componentsList = []
components = soup.find_all("component")
for co in components:
component_id = int(co.attrs.get("id"))
transform = co.find("transform")
r = transform.find("rotation").contents[0].split(" ")
t = transform.find("translation").contents[0].split(" ")
s = transform.find("scale").contents[0]
m = np.empty((4, 4))
m[0][0] = float(r[0])
m[0][1] = float(r[1])
m[0][2] = float(r[2])
m[0][3] = float(t[0])
m[1][0] = float(r[3])
m[1][1] = float(r[4])
m[1][2] = float(r[5])
m[1][3] = float(t[1])
m[2][0] = float(r[6])
m[2][1] = float(r[7])
m[2][2] = float(r[8])
m[2][3] = float(t[2])
m[3][0] = 0.0
m[3][1] = 0.0
m[3][2] = 0.0
m[3][3] = 1.0 * float(s)
data = {
"component_id": component_id,
"tx": float(t[0]),
"ty": float(t[1]),
"tz": float(t[2]),
"r00": float(r[0]),
"r01": float(r[1]),
"r02": float(r[2]),
"r10": float(r[3]),
"r11": float(r[4]),
"r12": float(r[5]),
"r20": float(r[6]),
"r21": float(r[7]),
"r22": float(r[8]),
"xf": m,
}
componentsList.append(data)
# CAMERAS
cameras = soup.find_all("camera")
for c in cameras:
sensor_id = c.attrs.get("sensor_id")
component_id = c.attrs.get("component_id")
if sensor_id is not None and component_id is not None:
sensor = next(
(
item
for item in sensorsList
if item["sensor_id"] == int(sensor_id)
),
None,
)
component = next(
(
item
for item in componentsList
if item["component_id"] == int(component_id)
),
None,
)
if sensor is not None and component is not None:
f = sensor["f"]
ox = sensor["ox"]
oy = sensor["oy"]
filename = c.attrs.get("label")
camera_transform = c.find("transform").contents[0].split()
component_xf = component["xf"]
camera_xf = np.empty((4, 4))
camera_xf[0][0] = float(camera_transform[0])
camera_xf[0][1] = float(camera_transform[1])
camera_xf[0][2] = float(camera_transform[2])
camera_xf[0][3] = float(camera_transform[3]) * component_xf[3][3]
camera_xf[1][0] = float(camera_transform[4])
camera_xf[1][1] = float(camera_transform[5])
camera_xf[1][2] = float(camera_transform[6])
camera_xf[1][3] = float(camera_transform[7]) * component_xf[3][3]
camera_xf[2][0] = float(camera_transform[8])
camera_xf[2][1] = float(camera_transform[9])
camera_xf[2][2] = float(camera_transform[10])
camera_xf[2][3] = float(camera_transform[11]) * component_xf[3][3]
camera_xf[3][0] = float(camera_transform[12])
camera_xf[3][1] = float(camera_transform[13])
camera_xf[3][2] = float(camera_transform[14])
camera_xf[3][3] = float(camera_transform[15])
xf = np.matmul(component_xf, camera_xf)
r00 = xf[0][0]
r01 = xf[0][1]
r02 = xf[0][2]
r03 = xf[0][3]
r10 = xf[1][0]
r11 = xf[1][1]
r12 = xf[1][2]
r13 = xf[1][3]
r20 = xf[2][0]
r21 = xf[2][1]
r22 = xf[2][2]
r23 = xf[2][3]
r30 = xf[3][0]
r31 = xf[3][1]
r32 = xf[3][2]
r33 = xf[3][3]
data = {
"img": filename,
"px": r03,
"py": r13,
"pz": r23,
"r00": r00,
"r01": r01,
"r02": r02,
"r10": r10,
"r11": r11,
"r12": r12,
"r20": r20,
"r21": r21,
"r22": r22,
"fx": sensor["f"],
"fy": sensor["f"],
"ox": sensor["ox"],
"oy": sensor["oy"],
}
json_path = os.path.join(imagesDirectory, f"{filename}.json")
with open(json_path, "w") as outfile:
pretty_print = json.dumps(data, indent=4)
outfile.write(pretty_print)
if __name__ == "__main__":
xmlFile = "path_to.xml"
imagesDirectory = "images\\directory"
main(xmlFile, imagesDirectory)To create a new map from the data:
- Clear the current workspace to start a new map
- Submit the images
- Start map construction
import os
import cv2 # pip install opencv-python
import base64
import requests # pip install requests
import json
import math
import struct
import concurrent.futures
import numpy as np
def ClearWorkspace(url, token, deleteAnchor):
complete_url = url + "/clear"
data = {"token": token, "anchor": deleteAnchor}
json_data = json.dumps(data)
r = requests.post(complete_url, data=json_data)
print(r.text)
def StartMapConstruction(url, token, preservePoses, mapName):
complete_url = url + "/construct"
data = {
"token": token,
"featureCount": 1024,
"preservePoses": preservePoses,
"name": mapName,
}
json_data = json.dumps(data)
r = requests.post(complete_url, data=json_data)
print(r.text)
def SubmitImage(imagesDirectory, jsonList, downsample, i, url, token):
complete_url = url + "/captureb64"
with open(os.path.join(imagesDirectory, jsonList[i]), "r") as f:
json_data = json.load(f)
fx = json_data["fx"]
fy = json_data["fy"]
ox = json_data["ox"]
oy = json_data["oy"]
filepath = os.path.join(imagesDirectory, json_data["img"])
run = 13 # some integer for the current "tracking session"
index = i
img = cv2.imread(f"{filepath}.png", cv2.IMREAD_GRAYSCALE)
height, width = img.shape
mpix = height * width
scaleFactor = math.sqrt(2000000 / mpix)
if downsample and scaleFactor < 1.0:
dim = (round(width * scaleFactor), round(height * scaleFactor))
resized = cv2.resize(img, dim, interpolation=cv2.INTER_AREA)
fx = fx * scaleFactor
fy = fy * scaleFactor
ox = ox * scaleFactor
oy = oy * scaleFactor
b64 = base64.b64encode(cv2.imencode(".png", resized)[1].tobytes())
else:
b64 = base64.b64encode(cv2.imencode(".png", img)[1].tobytes())
px = json_data["px"]
py = json_data["py"]
pz = json_data["pz"]
r00 = json_data["r00"]
r01 = json_data["r01"]
r02 = json_data["r02"]
r10 = json_data["r10"]
r11 = json_data["r11"]
r12 = json_data["r12"]
r20 = json_data["r20"]
r21 = json_data["r21"]
r22 = json_data["r22"]
pos = [px, py, pz]
rot = [r00, r01, r02, r10, r11, r12, r20, r21, r22]
data = {
"token": token,
"run": run,
"index": index,
"anchor": False,
"px": pos[0],
"py": pos[1],
"pz": pos[2],
"r00": rot[0],
"r01": rot[1],
"r02": rot[2],
"r10": rot[3],
"r11": rot[4],
"r12": rot[5],
"r20": rot[6],
"r21": rot[7],
"r22": rot[8],
"fx": fx,
"fy": fy,
"ox": ox,
"oy": oy,
"latitude": 0.0, # no GPS coordinates specified
"longitude": 0.0,
"altitude": 0.0,
"b64": str(b64, "utf-8"),
}
json_data = json.dumps(data)
r = requests.post(complete_url, data=json_data)
return r.text
def SubmitImageSet(imagesDirectory, url, token, downsample):
jsonList = [file for file in os.listdir(imagesDirectory) if file.endswith(".json")]
with concurrent.futures.ThreadPoolExecutor(max_workers=4) as executor:
results = [
executor.submit(
SubmitImage,
imagesDirectory,
jsonList,
downsample,
i,
url,
token,
)
for i in range(0, len(jsonList))
]
for f in concurrent.futures.as_completed(results):
print(f.result())
def main():
url = 'https://api.immersal.com'
token = "your-token-here"
imagesDirectory = "path\\to\\images"
mapName = "mapName"
downsample = True # Downsamples the input images to 2 mpix
preservePoses = True # Map will match the photogrammetry software coordinates
ClearWorkspace(url, token, True)
SubmitImageSet(imagesDirectory, url, token, downsample)
StartMapConstruction(url, token, preservePoses, mapName)
if __name__ == "__main__":
main()